
matlab单回路控制系统,MATLAB单回路控制系统设计与仿真研究
时间:2024-12-01 来源:网络 人气:
MATLAB单回路控制系统设计与仿真研究
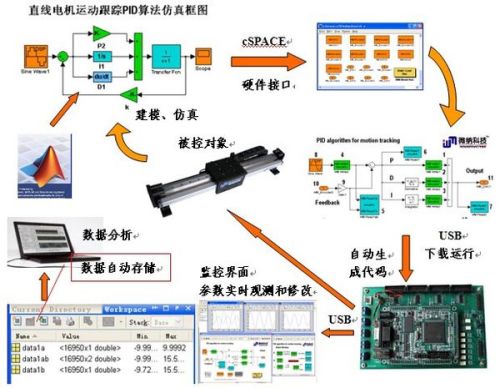
随着现代工业自动化程度的不断提高,控制系统在各个领域中的应用越来越广泛。MATLAB作为一种功能强大的数学计算软件,在控制系统设计、仿真和分析中发挥着重要作用。本文将介绍MATLAB单回路控制系统的设计与仿真方法,并通过实例进行分析。
一、单回路控制系统的基本概念

单回路控制系统是指由一个控制器、一个被控对象和一个反馈环节组成的闭环控制系统。其中,控制器根据被控对象的输出与设定值的偏差,调整控制信号,实现对被控对象的控制。单回路控制系统具有结构简单、易于实现等优点,是工业控制系统中应用最广泛的一种。
二、MATLAB单回路控制系统设计
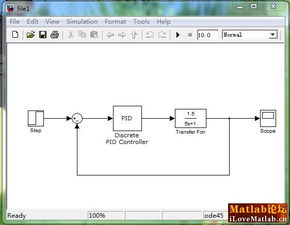
在MATLAB中,可以使用Simulink模块库进行单回路控制系统的设计与仿真。以下是一个简单的单回路控制系统设计步骤:
创建Simulink模型:打开Simulink软件,创建一个新的模型文件。
添加模块:从Simulink模块库中选择所需的模块,如被控对象、控制器、反馈环节等,并将其拖拽到模型窗口中。
连接模块:使用鼠标左键点击模块的输出端,然后拖拽到另一个模块的输入端,实现模块之间的连接。
设置参数:双击模块,设置模块的参数,如被控对象的传递函数、控制器的参数等。
仿真:运行仿真,观察系统动态响应。
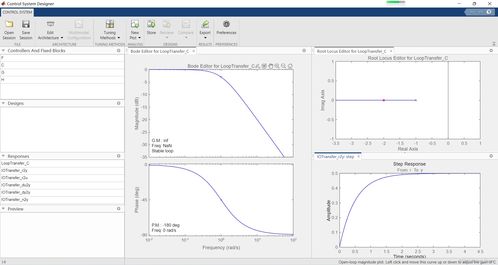
三、MATLAB单回路控制系统仿真
在Simulink中,可以对单回路控制系统进行仿真,分析系统的动态性能。以下是一个单回路控制系统仿真实例:
创建被控对象:假设被控对象为二阶系统,传递函数为G(s) = (s+1)/(s^2 + 2s + 1)。
创建控制器:选择PID控制器,设置比例、积分和微分参数,如Kp=1、Ki=0.5、Kd=0.1。
创建反馈环节:添加一个加法器模块,将控制器输出与被控对象输出相减,得到偏差信号。
设置仿真参数:设置仿真时间、步长等参数。
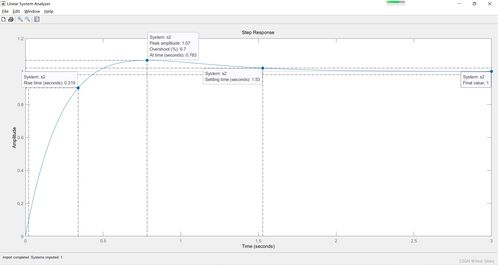
运行仿真:观察系统动态响应,分析系统的稳定性、超调量、上升时间等性能指标。
四、实例分析
以下是一个具体的单回路控制系统仿真实例,假设被控对象为二阶系统,传递函数为G(s) = (s+1)/(s^2 + 2s + 1),控制器为PID控制器,参数为Kp=1、Ki=0.5、Kd=0.1。
相关推荐




教程资讯
教程资讯排行









