fir滤波器系统函数,FIR滤波器的基本概念
时间:2024-11-13 来源:网络 人气:
在数字信号处理领域,FIR(Finite Impulse Response)滤波器因其线性相位特性和易于实现等优点,被广泛应用于各种信号处理任务中。本文将详细介绍FIR滤波器的系统函数,包括其定义、性质以及在实际应用中的重要性。
FIR滤波器的基本概念

FIR滤波器是一种线性时不变(LTI)系统,其输出仅依赖于当前和过去的输入信号,而不依赖于未来的输入信号。FIR滤波器的系统函数H(z)定义为输入信号X(z)和输出信号Y(z)的比,即H(z) = Y(z) / X(z)。
系统函数的定义

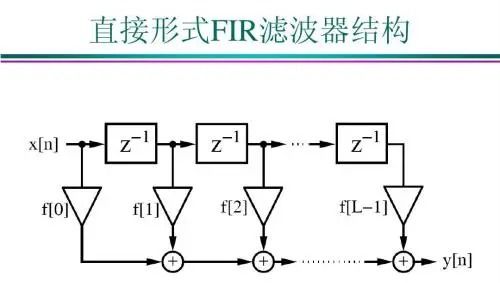
对于FIR滤波器,其系统函数可以表示为以下形式:
H(z) = Σ[b0 + b1z-1 + ... + bMz-M]
其中,b0、b1、...、bM是滤波器的系数,M是滤波器的阶数,z-1表示z的逆变换。
系统函数的性质
FIR滤波器的系统函数具有以下性质:
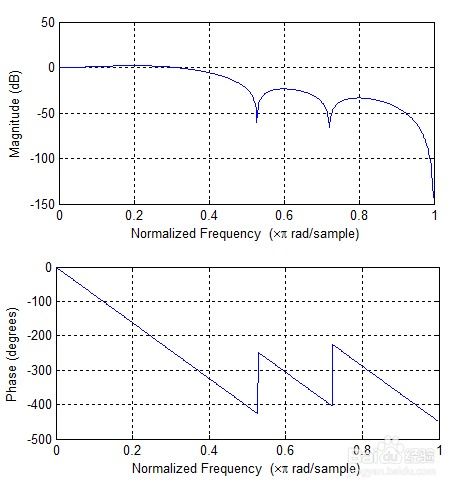
线性相位:FIR滤波器的系统函数具有线性相位特性,这意味着滤波器不会改变信号的相位,这对于保持信号波形至关重要。
无极点:FIR滤波器的系统函数的分母为1,这意味着滤波器没有极点,从而避免了系统的不稳定性。
有限冲击响应:FIR滤波器的输出仅依赖于有限个输入样本,因此其实现相对简单。
系统函数的应用
低通滤波器:用于去除信号中的高频噪声,保留低频信号成分。
高通滤波器:用于去除信号中的低频噪声,保留高频信号成分。
带通滤波器:用于保留信号中特定频率范围内的信号成分。
带阻滤波器:用于去除信号中特定频率范围内的信号成分。
系统函数的设计
FIR滤波器的系统函数设计通常采用以下方法:
窗函数法:通过选择合适的窗函数,对理想滤波器的单位脉冲响应进行截断,从而得到FIR滤波器的系数。
频率采样法:通过在单位圆上等间隔地采样理想滤波器的频率响应,得到FIR滤波器的系数。
优化设计法:通过优化目标函数,如最小化均方误差(MSE)或最大信噪比(SNR),设计满足特定要求的FIR滤波器。
结论
FIR滤波器的系统函数是数字信号处理中一个重要的概念,它决定了滤波器的性能和特性。通过对系统函数的研究,我们可以更好地理解和设计FIR滤波器,以满足各种信号处理需求。
参考文献
Oppenheim, A. V., Willsky, A. S., & Hamming, R. W. (2015). Signals and systems. Pearson Education.
Proakis, J. G., & Manolakis, D. G. (1996). Digital signal processing: principles, algorithms, and applications. Prentice Hall.
Haykin, S. (2009). Communication systems. John Wiley & Sons.
相关推荐




教程资讯
教程资讯排行