hc sr04超声波模块,智能测距的得力助手
时间:2024-11-04 来源:网络 人气:
HC-SR04超声波模块:智能测距的得力助手

一、HC-SR04超声波模块简介

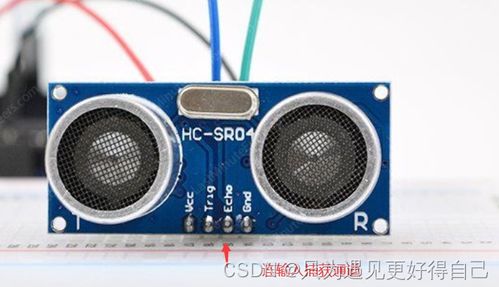
HC-SR04超声波模块是一款基于超声波原理的测距传感器,具有非接触、高精度、响应速度快等特点。该模块采用IO触发测距,通过发送超声波脉冲并接收回波信号,计算出超声波往返时间,从而实现距离测量。HC-SR04超声波模块广泛应用于机器人避障、物体测距、液位检测、公共安防、停车场检测等领域。
二、HC-SR04超声波模块工作原理

HC-SR04超声波模块主要由以下几部分组成:VCC(电源)、GND(接地)、Trig(触发信号输入)、Echo(回响信号输出)。以下是HC-SR04超声波模块的工作原理:
给Trig引脚输入一个至少10us的高电平信号,模块自动发送8个40kHz的方波。
模块自动检测是否有信号返回,如果有信号返回,通过Echo引脚输出一个高电平。
高电平持续时间即为超声波从发射到返回的时间。
根据声速和超声波往返时间,计算出实际距离。
声速温度公式:c = 330.45 + 0.61t (其中c为声速,t为温度,单位为摄氏度)
三、HC-SR04超声波模块应用实例
以下是一个简单的HC-SR04超声波模块测距实例,使用STM32单片机进行编程实现:
连接HC-SR04超声波模块到STM32单片机的GPIO引脚。
配置GPIO引脚为输出模式,用于发送触发信号。
配置GPIO引脚为输入模式,用于接收回波信号。
编写程序,发送触发信号,并记录Echo引脚高电平持续时间。
根据声速和超声波往返时间,计算出实际距离。
以下为部分代码示例:
include <stm32f10x.h>
void delay_us(uint16_t us)
for(uint16_t i = 0; i < us; i++)
{
__NOP();
}
void main(void)
// 初始化GPIO引脚
// ...
while(1)
{
// 发送触发信号
GPIO_SetBits(GPIOA, GPIO_Pin_0);
delay_us(10);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
// 记录Echo引脚高电平持续时间
uint32_t start_time = TIM_GetCounter(TIM2);
while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) == Bit_SET)
{
uint32_t end_time = TIM_GetCounter(TIM2);
uint32_t duration = end_time - start_time;
// 计算距离
// ...
}
}
HC-SR04超声波模块是一款功能强大、操作简便的智能测距传感器。通过本文的介绍,相信您已经对HC-SR04超声波模块有了更深入的了解。在实际应用中,您可以根据自己的需求,灵活运用HC-SR04超声波模块,为您的项目带来更多可能性。
相关推荐




教程资讯
教程资讯排行