
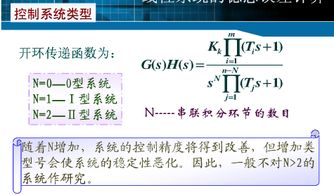
ii型系统,什么是II型系统?
时间:2024-11-01 来源:网络 人气:
什么是II型系统?

II型系统,也称为二阶系统,是自动控制理论中的一种系统类型。它由一个一阶积分环节和一个一阶惯性环节组成,其传递函数的一般形式为 ( G(s) = frac{K}{s^2 + 2zetaomega_ns + omega_n^2} ),其中 ( K ) 是系统的开环增益,( zeta ) 是阻尼比,( omega_n ) 是自然频率。
II型系统的特点

II型系统相较于I型系统,具有以下特点:
无静差跟踪:在斜坡输入信号下,II型系统可以完全消除稳态误差,实现无静差跟踪。
良好的动态性能:II型系统在阶跃输入下,虽然存在超调和振荡,但其动态性能通常优于I型系统。
对加速度输入敏感:II型系统对加速度输入信号较为敏感,因此在设计时需要考虑加速度输入的影响。
II型系统的应用
由于II型系统具有无静差跟踪和良好的动态性能,因此在许多领域都有广泛的应用,如:
工业控制:在工业生产过程中,II型系统可以用于控制电机、阀门等执行机构,实现精确的位置和速度控制。
航空航天:在航空航天领域,II型系统可以用于控制飞行器的姿态和速度,保证飞行安全。
机器人控制:在机器人控制系统中,II型系统可以用于控制机器人的运动轨迹和速度,提高作业效率。
II型系统的设计
设计II型系统时,需要考虑以下因素:
开环增益 ( K ):开环增益决定了系统的稳态误差和动态性能。在设计时,需要根据实际需求确定合适的开环增益。
阻尼比 ( zeta ):阻尼比决定了系统的超调和振荡程度。在设计时,需要根据实际需求确定合适的阻尼比,以平衡超调和振荡。
自然频率 ( omega_n ):自然频率决定了系统的响应速度。在设计时,需要根据实际需求确定合适的自然频率,以实现快速响应。
II型系统的稳定性分析
II型系统的稳定性分析主要基于劳斯-赫尔维茨判据。根据判据,当系统的特征方程的系数满足以下条件时,系统是稳定的:
所有系数均为正。
系数 ( a_0 ) 的绝对值大于系数 ( a_1 ) 的绝对值。
系数 ( a_1 ) 的绝对值大于系数 ( a_2 ) 的绝对值。
通过分析特征方程的系数,可以判断II型系统的稳定性。
II型系统在自动控制领域具有广泛的应用,其无静差跟踪和良好的动态性能使其成为许多控制系统的首选。在设计II型系统时,需要综合考虑开环增益、阻尼比和自然频率等因素,以确保系统满足实际需求。同时,对II型系统的稳定性分析也是设计过程中的重要环节。
相关推荐




教程资讯
教程资讯排行









