matlab与机器人控制系统,MATLAB在机器人控制系统中的应用与优势
时间:2024-10-16 来源:网络 人气:
MATLAB在机器人控制系统中的应用与优势
MATLAB在机器人控制系统设计中的应用
1. 控制系统建模与仿真
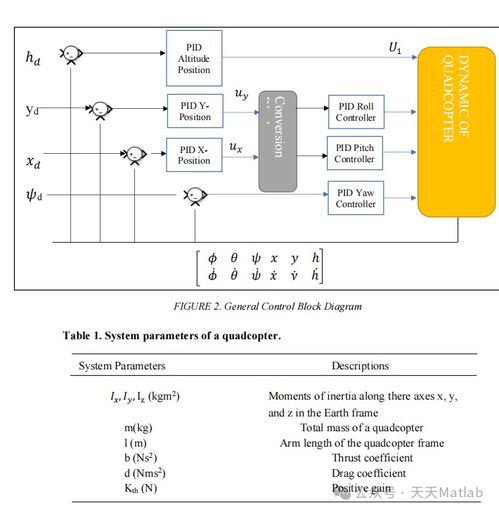
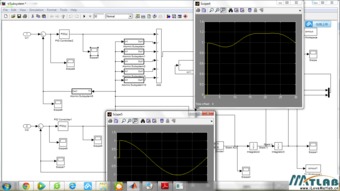
在机器人控制系统的设计中,首先需要对系统进行建模。MATLAB提供了丰富的工具箱,如Simulink,可以方便地建立机器人控制系统的数学模型。通过Simulink,可以直观地展示系统的动态特性,为后续的控制策略设计提供依据。
2. 控制策略设计
在MATLAB中,可以根据实际需求设计不同的控制策略,如PID控制、模糊控制、神经网络控制等。通过编写相应的MATLAB代码,可以实现对机器人控制系统的实时控制。
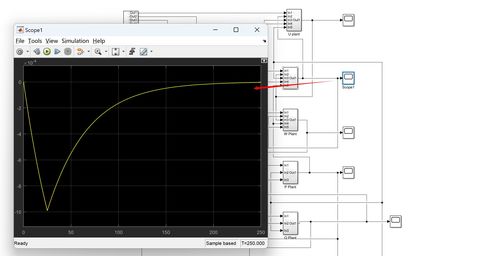
3. 仿真与优化
在MATLAB中,可以对设计的控制策略进行仿真,观察系统在不同工况下的响应。通过调整控制参数,可以优化控制效果,提高系统的稳定性和鲁棒性。
MATLAB在机器人控制系统中的优势
1. 高度集成化的工具箱
MATLAB提供了丰富的工具箱,如控制系统工具箱、机器人工具箱等,可以满足不同类型机器人控制系统的设计需求。
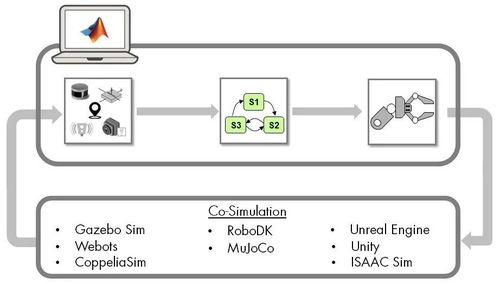
2. 强大的仿真功能
MATLAB的Simulink模块化仿真环境,可以方便地进行系统级仿真,提高设计效率。
3. 代码可移植性强
在MATLAB中编写的代码,可以方便地移植到其他编程环境中,如C/C++、Python等。
4. 丰富的资源与社区支持
MATLAB拥有庞大的用户群体和丰富的在线资源,可以方便地获取技术支持与解决方案。
MATLAB在机器人控制系统中的应用案例
1. 机器人路径规划
利用MATLAB的机器人工具箱,可以方便地进行机器人路径规划,实现机器人从起点到终点的最优路径规划。
2. 机器人抓取与放置
通过MATLAB的控制系统工具箱,可以设计机器人抓取与放置的控制策略,实现机器人对物体的精准抓取与放置。
3. 机器人避障
利用MATLAB的仿真功能,可以设计机器人避障算法,提高机器人在复杂环境中的自主导航能力。
MATLAB在机器人控制系统中的应用日益广泛,其强大的功能与优势为机器人控制系统的设计与仿真提供了有力支持。随着MATLAB工具箱的不断更新与完善,MATLAB在机器人控制系统中的应用前景将更加广阔。
相关推荐



教程资讯
教程资讯排行

系统教程
- 1 鸿蒙系统安卓代码公示,自主研发与兼容并蓄的操作系统发展之路”
- 2 安卓系统主题全局设置,个性化定制与美化技巧
- 3 安卓系统日志记录删除,安卓系统日志记录的删除方法与注意事项
- 4 平板电脑软件 安卓系统,实用与娱乐应用一网打尽
- 5 贸易战 安卓系统,安卓系统危机与中国科技产业的应对策略
- 6 deep in系统安装安卓,深入解析Deepin系统下Android应用的安装与部署过程
- 7 安卓128位系统手机,探索128位安卓系统手机的强大性能与丰富功能
- 8 洪蒙系统是安卓系统吗,揭秘其与安卓系统的关系与区别
- 9 安卓系统怎么刷root,轻松解锁手机潜能
- 10 美国能禁用安卓系统,影响与应对策略解析